ไขความลับการเคลื่อนที่แบบไซโคลอิด:
เมื่อล้อหมุนและลูกตุ้มแกว่งทำงานร่วมกัน

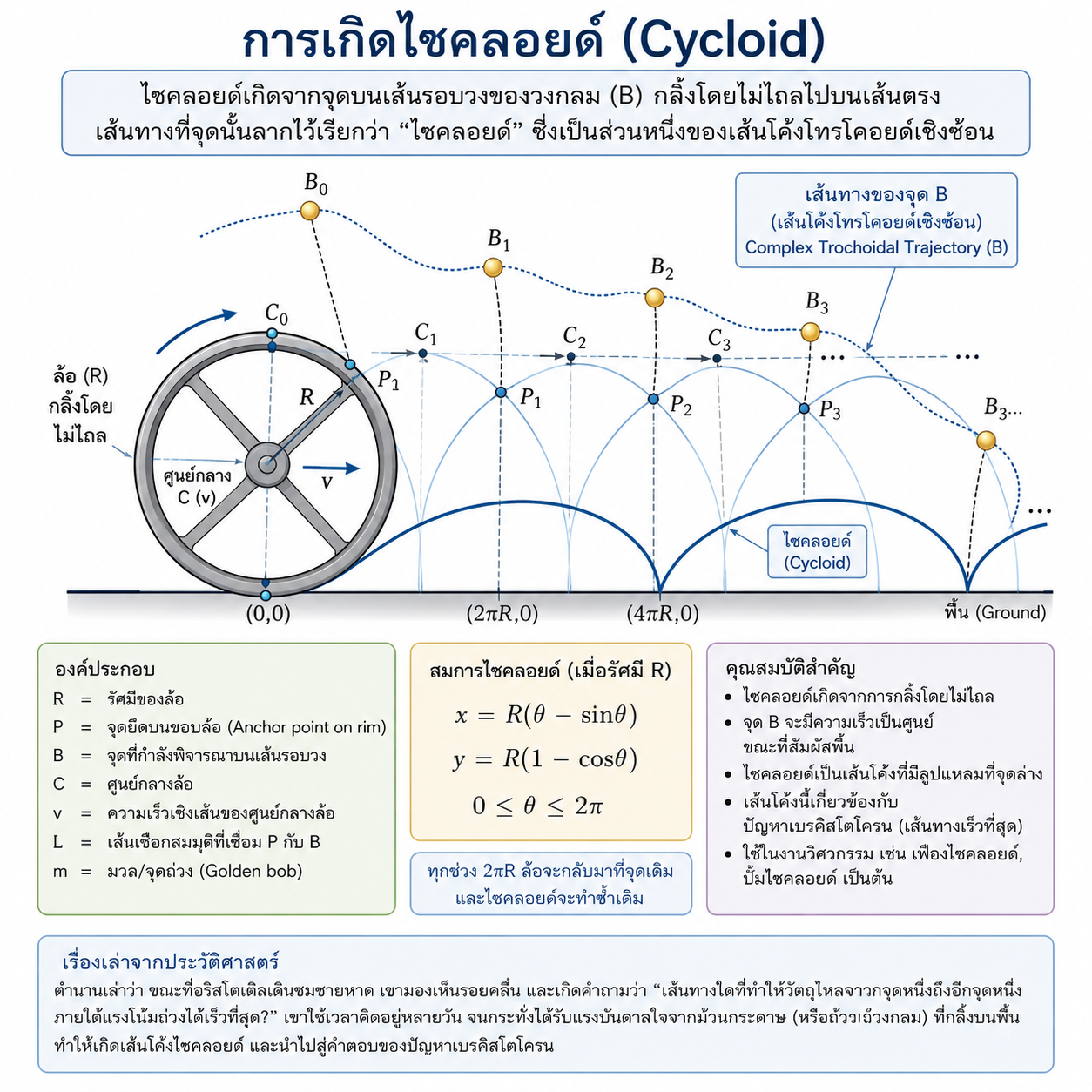
เคยสงสัยไหมว่าทำไมกลไกในเครื่องจักรที่ดูซับซ้อนถึงทำงานได้นุ่มนวลและแม่นยำ? คำตอบอาจซ่อนอยู่ในเส้นโค้งที่เรียบง่ายแต่ทรงพลังอย่าง "ไซโคลอิด" (Cycloid) ซึ่งเกิดจากการรวมตัวกันของสองการเคลื่อนไหวที่คุ้นเคย นั่นคือ การกลิ้งของล้อ และ การแกว่งของลูกตุ้ม
ในทางฟิสิกส์และคณิตศาสตร์ เมื่อเรานำการเคลื่อนที่แบบเชิงเส้น (ล้อที่กลิ้งไปข้างหน้า) มาซ้อนทับกับการเคลื่อนที่แบบแกว่ง (ลูกตุ้มที่แกว่งไปมา) เราจะได้เส้นทางเดินของวัตถุที่เรียกว่า "เส้นโค้งพารามิเตอร์" หัวใจสำคัญคือการที่จุดแขวนของลูกตุ้มไม่ได้หยุดนิ่ง แต่เคลื่อนที่ไปพร้อมกับล้อ ทำให้เกิดการถ่ายโอนพลังงานและแรงเฉื่อยในระบบตลอดเวลา ผลลัพธ์ที่ได้ไม่ใช่แค่วงกลมหรือเส้นตรง แต่เป็นเส้นโค้งที่ซับซ้อนซึ่งมีความถี่และทิศทางแปรผันตามความเร็วในการหมุนและจังหวะการแกว่ง
1 ฟิสิกส์ของลูกตุ้มบนล้อกลิ้งบนพื้นราบ (Non-inertial Dynamics)
การเคลื่อนที่ของลูกตุ้มที่แขวนบนล้อที่กำลังกลิ้ง (Pendulum on a rolling wheel) มีความซับซ้อนกว่าการแกว่งแบบปกติ (Simple Pendulum) เนื่องจากเกิดจาก การรวมกันของระบบอ้างอิงที่ไม่เฉื่อย (Non-inertial reference frame) ซึ่งมีปัจจัยทางพลศาสตร์หลักดังนี้:
1.1 การเปลี่ยนแปลงของจุดหมุน (Moving Pivot)
ในการแกว่งปกติ จุดแขวนจะอยู่นิ่ง แต่เมื่อลูกตุ้มแขวนอยู่บนล้อที่กลิ้ง จุดแขวนจะเคลื่อนที่ไปพร้อมกับล้อด้วย ทำให้เกิดการถ่ายโอนพลังงานระหว่างการหมุนของล้อและการแกว่งของลูกตุ้มตลอดเวลา
1.2 แรงเสมือน (Fictitious Forces)
เนื่องจากล้อมีการเคลื่อนที่แบบกลิ้ง ซึ่งประกอบด้วยทั้งการเคลื่อนที่แบบเลื่อนตำแหน่ง (Translation) และการหมุน (Rotation) ทำให้จุดแขวนลูกตุ้มมีความเร่ง:
- ความเร่งแนวราบ: เกิดจากความเร็วและความเร่งของศูนย์กลางล้อ
- ความเร่งสู่ศูนย์กลาง (Centripetal Acceleration): เกิดจากการที่จุดยึดลูกตุ้มเปลี่ยนทิศทางหมุนตามการกลิ้งของล้อ
- แรงโคริออลิส (Coriolis Force): หากล้อมีความเร็วเชิงมุม แรงนี้จะส่งผลต่อทิศทางการแกว่งของลูกตุ้มในระนาบสัมพัทธ์
1.3 การส่งผ่านพลังงานแบบ Coupling และสภาวะสมดุล
ในระบบนี้ พลังงานจลน์ไม่ได้มาจากแค่การแกว่ง แต่ยังขึ้นอยู่กับความเร็วเชิงมุมของล้อและแรงเสียดทานที่พื้น หากล้อกลิ้งด้วยความเร็วไม่คงที่ จะเกิดแรงเฉื่อยกระทำต่อลูกตุ้ม ทำให้สมการการเคลื่อนที่ (Equation of Motion) กลายเป็นสมการเชิงอนุพันธ์แบบไม่เชิงเส้น (Non-linear differential equation) ที่มีตัวแปรเกี่ยวเนื่องกัน (Coupled)
เปรียบเทียบองศาอิสระ (Degrees of Freedom)
• ลูกตุ้มปกติ: เป็นระบบที่มี 1 องศาอิสระ คือมุมการแกว่ง ($\theta$) เท่านั้น
• ลูกตุ้มบนล้อ: เป็นระบบที่มีหลายองศาอิสระ ทั้งตำแหน่งของล้อ ($x$), มุมการหมุนของล้อ ($\theta$) และมุมการแกว่งของลูกตุ้ม ($\phi$) ซึ่งทั้งหมดส่งผลกระทบต่อกัน ทำให้เกิดการเคลื่อนที่ที่ซับซ้อนและวิถีโค้งที่น่าทึ่ง
กิจกรรม: สังเกตวิถีโค้งและการสั่นพ้องในแบบจำลอง
ในแบบจำลองด้านบน คุณสามารถปรับพารามิเตอร์ล้อและเชือกได้ ลองทำภารกิจต่อไปนี้เพื่อทำความเข้าใจ:
🎯 ภารกิจที่ 1: เปรียบเทียบความเร็วล้อ
ลองปรับ "ความเร็วล้อ (v)" ให้ต่ำสุดเทียบกับสูงสุด
👉 สังเกต: วิถีสีทองของลูกตุ้มจะถูกยืดออกเมื่อล้อวิ่งเร็ว และจะม้วนพันกันซับซ้อนเมื่อล้อวิ่งช้า
🎯 ภารกิจที่ 2: ปรับความยาวเชือก
ลองปรับ "ความยาวเชือก (L)" ให้สั้นกว่ารัศมีล้อ (R)
👉 สังเกต: ความถี่ในการแกว่งของลูกตุ้มเปลี่ยนแปลงอย่างไรเมื่อเทียบกับคาบการหมุนของล้อ?
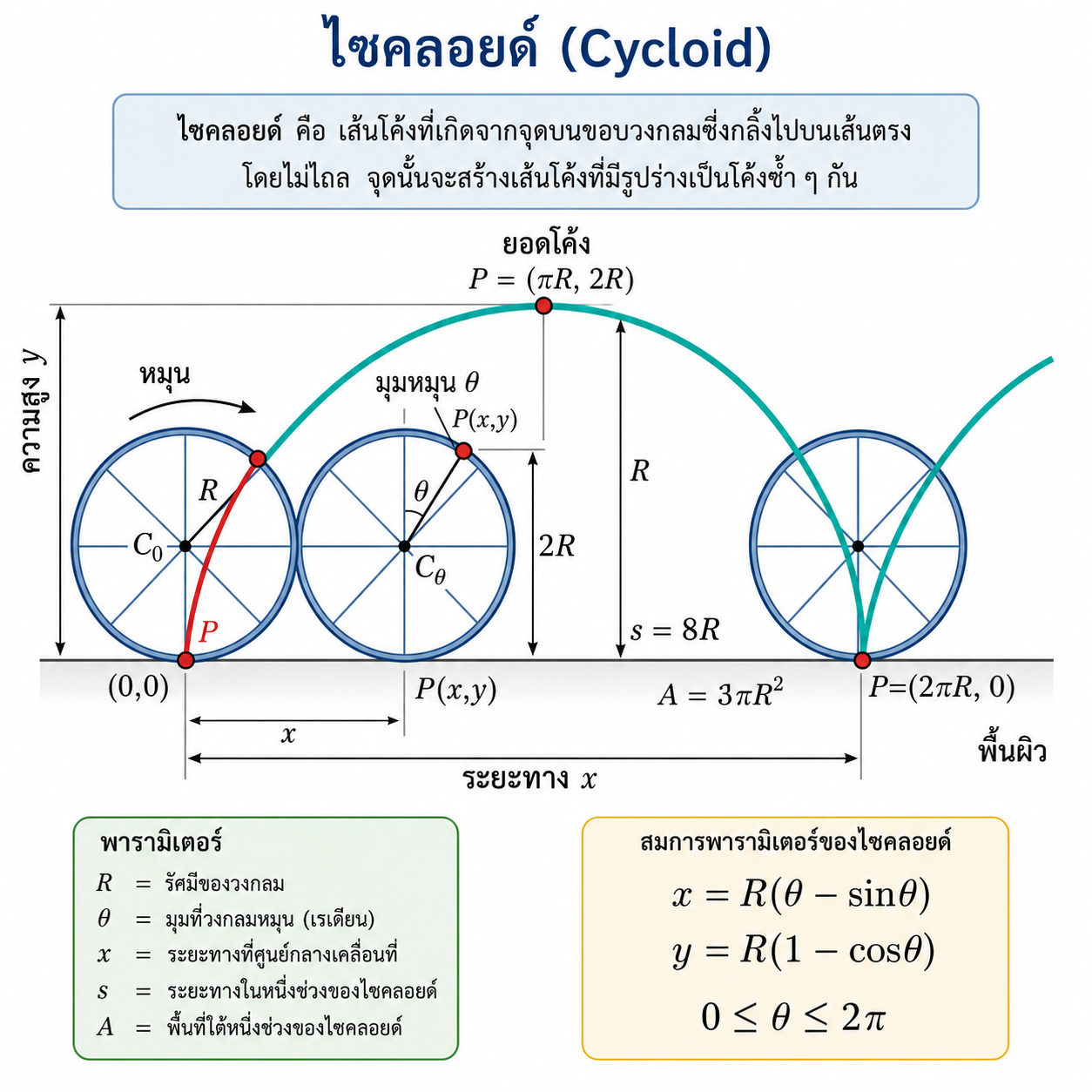
2 แบบจำลองคณิตศาสตร์และการซ้อนทับ (Mathematical Model)
เส้นโค้งที่เกิดจากการซ้อนทับของการเคลื่อนที่แบบหมุน (Rotation) และการแกว่ง (Oscillation) ในเชิงคณิตศาสตร์ คือการรวมกันของ ฟังก์ชันพารามิเตอร์ (Parametric Functions) โดยเราสามารถสร้างแบบจำลองได้ดังนี้:
2.1 องค์ประกอบของการเคลื่อนที่
เราแยกการเคลื่อนที่ออกเป็นสองส่วนหลักในระนาบ XY:
-
การเคลื่อนที่ของจุดศูนย์กลางล้อ (Translation): หากล้อกลิ้งไปทางขวาด้วยความเร็วเชิงมุม $\omega$ และรัศมี $R$ จุดศูนย์กลางล้อจะเคลื่อนที่ตามฟังก์ชัน:
$$x_c(t) = R\omega t, \quad y_c(t) = R$$
-
การแกว่งของลูกตุ้ม (Oscillation): ลูกตุ้มที่มีความยาว $L$ แกว่งด้วยมุม $\theta(t) = \theta_0 \sin(\Omega t)$ (โดย $\Omega$ คือความถี่ธรรมชาติของการแกว่ง) ตำแหน่งของลูกตุ้มเมื่อเทียบกับจุดศูนย์กลางล้อคือ:
$$x_p(t) = L \sin(\theta(t)), \quad y_p(t) = -L \cos(\theta(t))$$
2.2 การซ้อนทับ (Superposition)
ตำแหน่งรวมของปลายลูกตุ้ม $P(x, y)$ คือผลรวมของตำแหน่งจุดศูนย์กลางล้อและตำแหน่งสัมพัทธ์ของลูกตุ้ม:
2.3 หลักการฟิสิกส์เชิงคณิตศาสตร์ที่เกี่ยวข้อง
• Modulation: สมการนี้แสดงถึงกระบวนการ "การมอดูเลต" (Modulation) ทางตำแหน่ง โดยที่การเคลื่อนที่แบบเชิงเส้นถูกรบกวนด้วยฟังก์ชันตรีโกณมิติซ้อนทับกัน (Nested Trigonometric Functions) ทำให้เกิดเส้นโค้งที่มีลักษณะคล้าย Trochoid แต่มีความถี่แปรผันตามมุมแกว่ง
• Coupled Oscillators: ในเชิงวิศวกรรม หากล้อมีการหมุนที่ไม่สม่ำเสมอ หรือมีการถ่ายโอนพลังงานผ่านแรงเสียดทาน $\theta(t)$ จะไม่เป็นฟังก์ชันไซน์บริสุทธิ์ แต่จะกลายเป็นสมการเชิงอนุพันธ์อันดับสอง:
(โดยที่ $a_x$ คือความเร่งของจุดแขวนลูกตุ้ม ซึ่งขึ้นอยู่กับความเร่งของล้อ)
2.4 ลักษณะของเส้นโค้ง (Non-linear Trajectories)
- หาก $\omega$ (ความเร็วล้อ) สูงกว่า $\Omega$ (ความถี่แกว่ง) มากๆ เส้นโค้งจะดูเหมือนเส้นตรงที่หยักเป็นคลื่นเล็กน้อย
- หาก $\omega$ และ $\Omega$ มีค่าใกล้เคียงกัน จะเกิดรูปแบบ Lissajous-like curve ที่เคลื่อนที่ไปข้างหน้าตามแนวแกน X ทำให้เกิดลวดลายที่ซับซ้อน เช่น ลักษณะวงก้นหอยหรือเส้นโค้งแบบคลื่นซ้อนคลื่น (Epicycloid-like trajectories)
เส้นโค้งเหล่านี้เป็นตัวอย่างคลาสสิกของ Non-linear Dynamics ซึ่งอธิบายว่าการรวมกันของระบบที่เรียบง่ายสามารถสร้างเรขาคณิตที่มีความซับซ้อนและคาดเดาได้ยาก
3 ลูกตุ้มบนล้อกลิ้งในรางโค้ง (Curved Track Dynamics)
เมื่อยกระดับความซับซ้อนขึ้นไปอีกขั้น โดยให้ล้อไม่ได้กลิ้งบนพื้นราบ แต่กลิ้งไปมาอยู่ภายใน รางโค้งครึ่งวงกลม ระบบจะเกิดพลศาสตร์ที่ท้าทายยิ่งขึ้น:
1. การกลิ้งของล้อในรางโค้ง: ล้อจะกลิ้งไปมาแบบฮาร์มอนิกอย่างง่าย ทำให้เกิดความเร่งลัพธ์ทั้งในแกน X และ Y เปลี่ยนแปลงตลอดเวลาตามตำแหน่งของล้อในราง
2. ความเร่งโน้มถ่วงยังผล (Effective Gravity): เมื่อจุดหมุนลูกตุ้มเคลื่อนที่ขึ้นลงในรางโค้ง ความเร่งในแนวดิ่งจะไปเสริมหรือหักล้างกับค่า $g$ เดิม ทำให้ลูกตุ้มรู้สึก "หนักขึ้น" เมื่อล้ออยู่ที่ก้นราง และ "เบาลง" เมื่อล้อไต่ขึ้นขอบราง
กิจกรรม: สังเกตผลกระทบของจุดหมุนในรางโค้ง
ทดลองปรับพารามิเตอร์ในแบบจำลองที่ 2 เพื่อดูความเปลี่ยนแปลงอันน่าทึ่ง:
🎯 ภารกิจที่ 1: เปลี่ยนตำแหน่งจุดหมุน
ลองสลับ "ตำแหน่งจุดหมุนลูกตุ้ม" ระหว่างขอบล้อและจุดศูนย์กลางล้อ
👉 สังเกต: ความเรียบเนียนของวิถีลูกตุ้มต่างกันอย่างไรเมื่อจุดหมุนไม่มีความเร่งสู่ศูนย์กลางย่อย?
🎯 ภารกิจที่ 2: สังเกตความเร่งโน้มถ่วงเสมือน
จับตาดูจังหวะที่ล้อกลิ้งผ่านจุดต่ำสุดของรางโค้ง
👉 สังเกต: ลูกตุ้มจะถูกเหวี่ยงแรงขึ้นเนื่องจาก Effective Gravity ($g_{eff}$) สูงสุด ณ จุดก้นราง
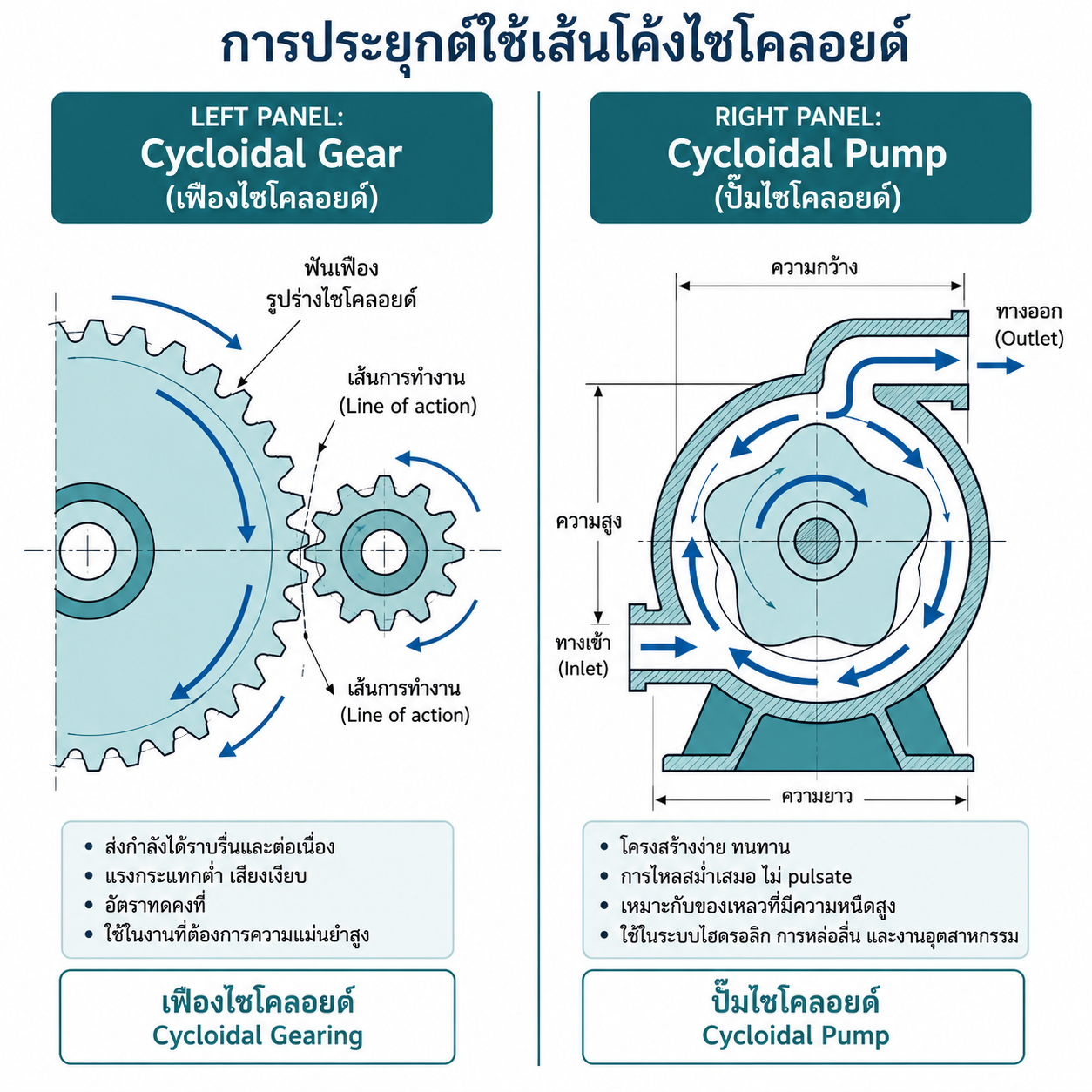
4 การประยุกต์ใช้ในวิศวกรรมเครื่องกล (Engineering Applications)
เส้นโค้งไซโคลอิดไม่ได้เป็นเพียงรูปทรงเรขาคณิตที่สวยงาม แต่เป็นหัวใจสำคัญในวิศวกรรมเครื่องกลที่ช่วยเพิ่มประสิทธิภาพการทำงานได้มหาศาล นี่คือสรุปการประยุกต์ใช้ใน 2 รูปแบบหลัก:
4.1 เฟืองไซโคลอิด (Cycloidal Gearing)
ในขณะที่เฟืองทั่วไปใช้รูปทรงแบบ Involute แต่เฟืองไซโคลอิดถูกออกแบบมาเพื่อลดการสึกหรอและเพิ่มความนุ่มนวลในการส่งกำลัง
• หลักการ: ใช้เส้นโค้งไซโคลอิดสร้างรูปร่างฟันเฟือง ทำให้เกิดการสัมผัสที่จุดที่เหมาะสมที่สุด ลดแรงเสียดทาน
• ความทนทานและความเงียบ: กระจายแรงกดบนผิวสัมผัสได้ดีเยี่ยม รับโหลดหนักได้ดี และส่งผ่านแรงบิดได้ต่อเนื่อง ลดการสั่นสะเทือน
• การใช้งาน: หุ่นยนต์อุตสาหกรรม (Robotic Arm) หรือชุดเกียร์ความแม่นยำสูง
4.2 ปั๊มไซโคลอิด (Cycloidal Pumps)
เป็นหัวใจสำคัญในระบบหล่อลื่นของเครื่องยนต์หลายประเภท โดยใช้หลักการของเรขาคณิตไซโคลอิดมาสร้างแรงดันของเหลว
• หลักการ: โรเตอร์ด้านในไซโคลอิดหมุนภายในโรเตอร์ด้านนอก ทำให้ปริมาตรช่องว่างเปลี่ยนแปลงต่อเนื่อง
• ประสิทธิภาพสูง: สร้างแรงดันได้สม่ำเสมอ ลดการกระเพื่อมของแรงดัน และมีสมรรถนะการดูด (Self-priming) ยอดเยี่ยม
• การใช้งาน: ปั๊มน้ำมันเครื่องในเครื่องยนต์สันดาปภายใน
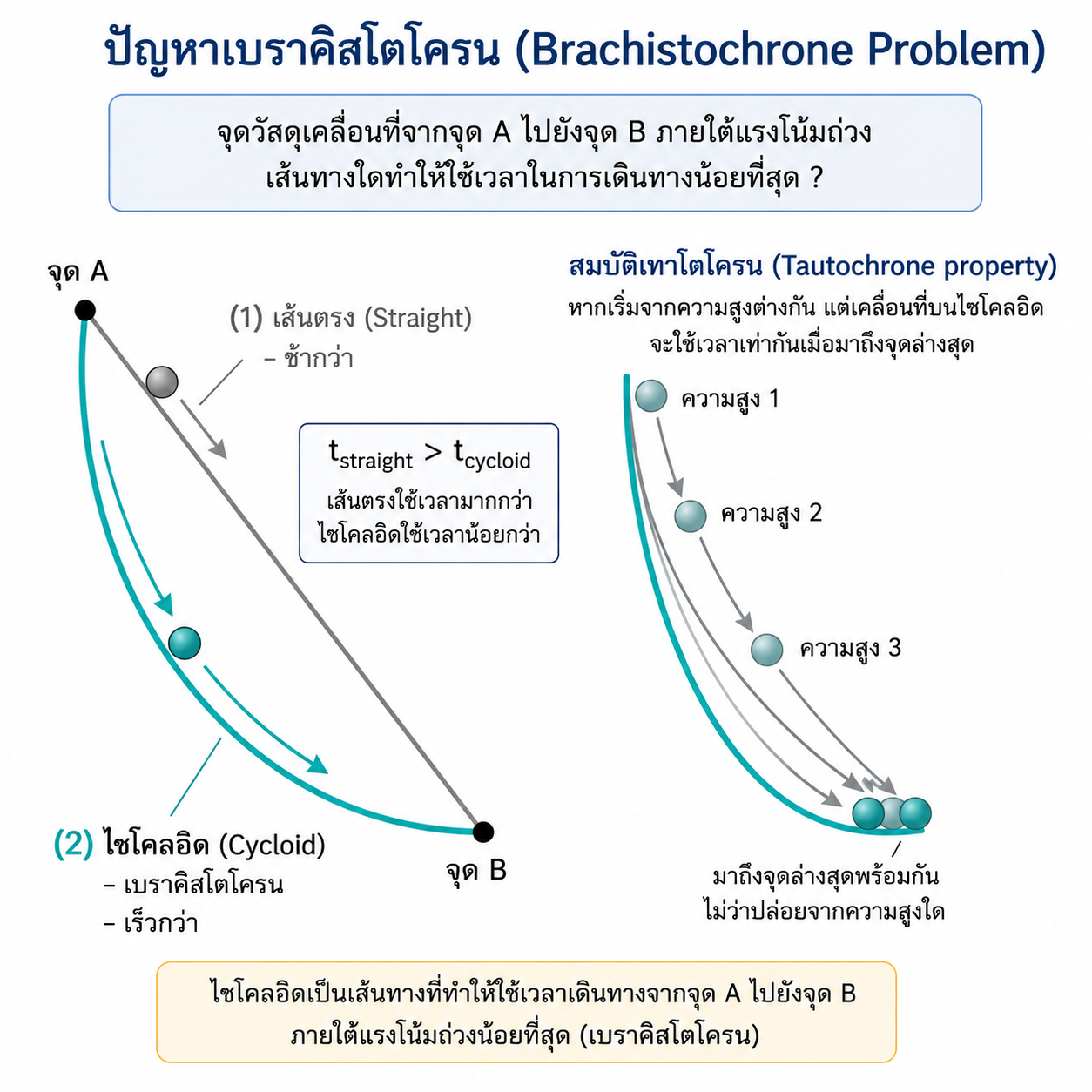
4.3 สมบัติพิเศษ: Brachistochrone และ Tautochrone
ความลับที่ทำให้ไซโคลอิดพิเศษกว่าเส้นโค้งอื่น คือสมบัติทางฟิสิกส์ชั้นสูง 2 ประการ ได้แก่:
เส้นทางที่เร็วที่สุดและเท่าเทียมที่สุด
1. Brachistochrone (เส้นทางที่ใช้เวลาน้อยที่สุด): หากปล่อยวัตถุให้ไถลลงมาภายใต้แรงโน้มถ่วงจากจุด A ไปจุด B (ที่ไม่ได้อยู่ตรงกันในแนวดิ่ง) เส้นทางโค้งแบบไซโคลอิดจะทำให้วัตถุไปถึงปลายทางได้เร็วกว่าเส้นตรงหรือเส้นโค้งอื่นๆ เสมอ
2. Tautochrone (เส้นทางที่ใช้เวลาเท่ากัน): ไม่ว่าจะวางวัตถุไว้ที่ระดับความสูงใดบนเส้นโค้งไซโคลอิดหงาย วัตถุเหล่านั้นจะไถลลงมาถึงจุดต่ำสุดพร้อมกันเสมอ!
เอกสารประกอบ: Cycloidal Motion Dynamics 📚
ศึกษาเพิ่มเติมเจาะลึกเกี่ยวกับข้อมูลและกลไกเชิงพลศาสตร์ของไซโคลอิดได้จากสไลด์บทเรียนด้านล่างนี้
สไลด์: Cycloidal Motion Dynamics
PDF Documentเอกสารประกอบการเรียน
หน้าจอมือถืออาจจะเล็กเกินไปสำหรับการอ่านสไลด์ แนะนำให้เปิดอ่านแบบเต็มจอหรือดาวน์โหลดเก็บไว้เพื่อความสะดวก
ดาวน์โหลด / เปิดสไลด์บทสรุป: คณิตศาสตร์ที่มีชีวิต ✨
เมื่อเรามองเห็นล้อที่กำลังกลิ้งและลูกตุ้มที่กำลังแกว่ง เราไม่ได้เห็นแค่การเคลื่อนที่ธรรมดา แต่เรากำลังเห็น "คณิตศาสตร์ที่มีชีวิต" การที่ระบบเครื่องกลเลือกใช้เส้นโค้งไซโคลอิด จึงเปรียบเสมือนการเลือกเส้นทางที่สูญเสียพลังงานน้อยที่สุดและมีประสิทธิภาพสูงสุดในการทำงาน เพื่อขับเคลื่อนโลกอุตสาหกรรมและเทคโนโลยีให้ก้าวไปข้างหน้าอย่างราบรื่นและเปี่ยมด้วยประสิทธิภาพครับ
อยากลองสำรวจปรากฏการณ์วิทยาศาสตร์อื่นๆ ไหม?
มาลองเล่นและเรียนรู้ด้วย Interactive Science Simulator แบบนี้ได้ที่ Panya AI Tutor เลย!
ลองใช้งาน Panya AI Tutor ฟรี